Geophysics
360survey uses different geophysical detection techniques to obtain an image of the soil, both on land and under water. These techniques can be used for a variety of applications: geology & geotechnics, archaeology or to find objects and structures within the soil (e.g. cables, pipelines, UXO, foundations, tanks, voids, etc.) Below you can find an overview of the techniques we offer. Have a look and be sure to come back some time in the future as we keep adding examples of past projects to this page.
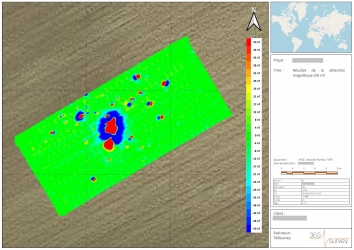
A magnetometer measures the total flux of the earth's magnetic field in its surroundings. This field can locally be disturbed by the presence of rocks or objects containing iron. The burial depth of an object can be modelled by combining multiple probes (gradiometer set-up).
Depending on the detection goal, we make use of different magnetometer types (uniaxial or triaxial fluxgate probes, total field probes) that can be used both on land and water, for both surface area detection or intrusive detection (borehole probes).
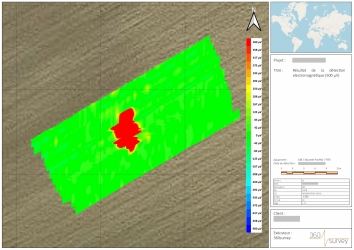
An electromagnetometer generates a primary electro-magnetic field and induces, within range of this field, secondary electric currents in metal objects. This way, a secondary electro-magnetic field is created and this field is measured at multiple time intervals. The rate of decay of this secondary field is proportionate to the size and depth of the object.
This technique can be used both on land and under water. An important advantage of this technique is that not only objects containing iron can be detected, but also cast iron and other alloys.
A ground penetrating radar or GPR emits an electro-magnetic pulse which is partially reflected and partially absorbed by the soil. The reflected signal is detected and the signal strength is proportionate to the degree of contrast between materials in the soil. The time it takes for the signal to return and to be detected, allows us to estimate the depth of an object or layer. The centre frequency of the emitted pulse determines the penetration depth of the signal and is chosen in function of the purpose: geological or geotechnical applications (low centre frequency), archaeology or object detection (intermediate centre frequency), quality checks of structures (high centre frequency). The result of a measurement strongly depends on the soil conditions: dry or saturated sandy soils guarantee a good signal penetration, while the results are typically of lesser quality in soils consisting of clay or silt and when (salt) water is present.
We asses if the technique is suitable for your project location and with which type of antenna the desired result can be achieved. With the use of a trailer system, it is also possible to efficiently detect larger areas.
A subbottom profiler emits an acoustic wave that penetrates the water column and is subsequently partially absorbed and partially reflected by sediment on the bottom. Since most SBP-systems are designed for geological applications (large penetration depth, low frequency), only a minor number of systems can be used for object detection. Especially important in choosing a system is the capacity of the device (maximal pulse length and pulse frequency) and the pulse characteristics. Due to the difference in acoustic impedance between an object and the surrounding sediment, the object will be perceived as a clearly visible hyperbolic reflection. The detectability of an object is dependant of its dimensions, the intersection line between the measuring line and the object, the speed of the vessel, the measuring frequency and the distance between measuring lines.
This technique is suitable for the detection of buried objects and can be a valuable complement to an (electro-)magnetic survey.
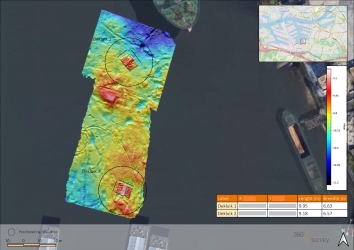
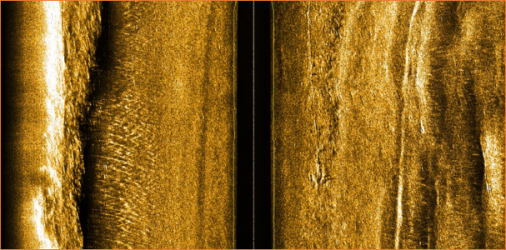
A side scan sonar emits an acoustic wave that penetrates the water column and is subsequently reflected by the bottom. This way, an image of the sea floor is created comparable to an aerial photograph on land.
This technique is suitable for the detection of objects on the bottom (think of lost anchors, propellors, tubes, etc.) and can be a valuable complement to an (electro-)magnetic survey.
This system consist of a main module (emitter) to which a sensor cable is attached which is equipped with electrodes (receivers). The main module emits an electric pulse which is (partially) registered by the electrodes (due to induced electrical potential). The potentials are a function of the resistivity of the bottom and the distance between the main module and the receivers. In turn, this distance determines the penetration depth of the signal. In the data processing, focus is more on contrast enhancement and less on the realistic modelling of the soil properties. The detection limit for objects is dependant on the dimensions of the object, the salinity of the water, the distance between the electrodes, the emitted amperage and the vessel speed.
This technique can propose a solution in areas with strong disturbances, where the magnetic signal is saturated. An other advantage is that not only iron containing metals are detected.